Мы в Сети
Календарь
Популярное
Облако тегов
NASA Аппарат Атом Батарея Галактика Данные Датчик Двигатель Движение Звезда Информация Искусственный Испытания Камера Компьютер Космический Лазер Материал Материя Машины Монстры НАСА Поверхность Полет Рекорд Робот Свет Система Скорость Снимок Телескоп Температура Управление Фотон Частица Электрический Электрон Энергия автомобиль человек
Архивы
2022 -
I, II, III, IV
2021 - I, II, III, IV
2020 - I, II, III, IV
2019 - I, II, III, IV
2018 - I, II, III, IV
2017 - I, II, III, IV
2016 - I, II, III, IV
2015 - I, II, III, IV
2014 - I, II, III, IV
2013 - I, II, III, IV
2012 - I, II, III, IV
2011 - I, II, III, IV
2010 - I, II, III, IV
2009 - I, II, III, IV
2021 - I, II, III, IV
2020 - I, II, III, IV
2019 - I, II, III, IV
2018 - I, II, III, IV
2017 - I, II, III, IV
2016 - I, II, III, IV
2015 - I, II, III, IV
2014 - I, II, III, IV
2013 - I, II, III, IV
2012 - I, II, III, IV
2011 - I, II, III, IV
2010 - I, II, III, IV
2009 - I, II, III, IV
Счетчики
| Сегодня, 05:04 | Робототехника
IHMC Nadia - новый робот, более совершенный конкурент робота Atlas от Boston Dynamics

Институт IHMC (Institute for Human & Machine Cognition) является достаточно известной в области робототехники организацией. С 2015 года специалисты этого института работали с гуманоидным роботом Atlas компании Boston Dynamics, который занял второе место на соревновании DARPA Robotics Challenge. Несколько позже парк института пополнился роботом Valkyrie, разработанным в НАСА. Сотрудники института проделали большую работу в области программного и аппаратного обеспечения этих роботов, но, как и все в окружающем нас мире, эти роботы морально устарели к настоящему времени, и до последнего момента на свете не было достойной альтернативы, робота с силой, скоростью, ловкостью и гибкостью, сопоставимого с человеком.

Некоторое время назад руководство института IHMC приняло решение о создании с нуля своего собственного робота, и в 2019 году на свет появилась первая полностью пластиковая версия робота Nadia, способного выполнять определенные задачи со скоростью, сопоставимой со скоростью человека. После этого было создано еще 16 (!) экспериментальных пластиковых вариантов робота Nadia, и недавно на свет появился его окончательный вариант.
Конструкция робота Nadia впитала в себя все лучшее от робота Atlas DRC и Valkyrie, он более быстр, более гибок и прочен, чем любой из его предшественников. Движения этого робота обеспечивает гибридная электрическо-гидравлическая система и привода разного типа. Руки робота с электрическими приводами имеют 7 степеней свободы, тазобедренный сустав - 3 степени свободы, туловище - 2 степени свободы и ноги - 5 степеней свободы. Гидравлика объединена с умной электроникой, что обеспечивает максимально возможный диапазон движений, выполняемых с высокой точностью. А защита из углеродного волокна, покрывающая большую часть конструкции робота Nadia, обеспечивает безопасный контакт с окружающей средой.
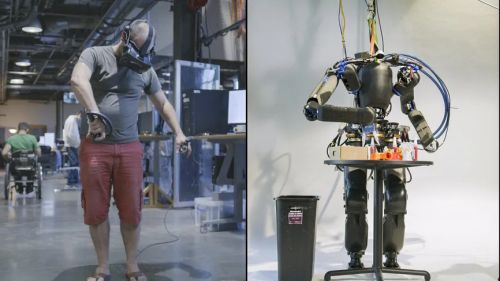
Система управления робота Nadia достаточно умна и интеллектуальна для обеспечения выполнения большинства действий в автоматическом режиме. Но, как показала практика в лице финала соревнования DARPA Robotics Challenge, всегда должна иметься возможность перехвата управления человеком для выполнения действий в условиях ограниченного пространства, сложной окружающей среды или чрезвычайной ситуации.
Дальнейшие работы над аппаратной и программной частями робота Nadia должны приблизить скорость его движений максимально близко к скорости движений человека. Ведь именно в этом случае телеоператор-человек сможет максимально эффективно использовать все возможности своего "механического аватара".
Ключевые слова:
Робот, IHMC, Nadia, Atlas, Boston Dynamics, DARPA, Robotics Challenge
Первоисточник
Другие новости по теме:
| Комментарии: 0 | 
Информация
Посетители, находящиеся в группе Гости, не могут оставлять комментарии к данной публикации.